Release time:Aug 30, 2025 Author:Teleconix Inc.
For AI robots using soft hard composite boards, the performance of high-frequency FCCL is not simply "high" in a single dimension, but needs to be deeply adapted to the application scenarios and work environments of the robot. The selection of its core performance indicators directly affects the overall performance of the soft hard composite board.
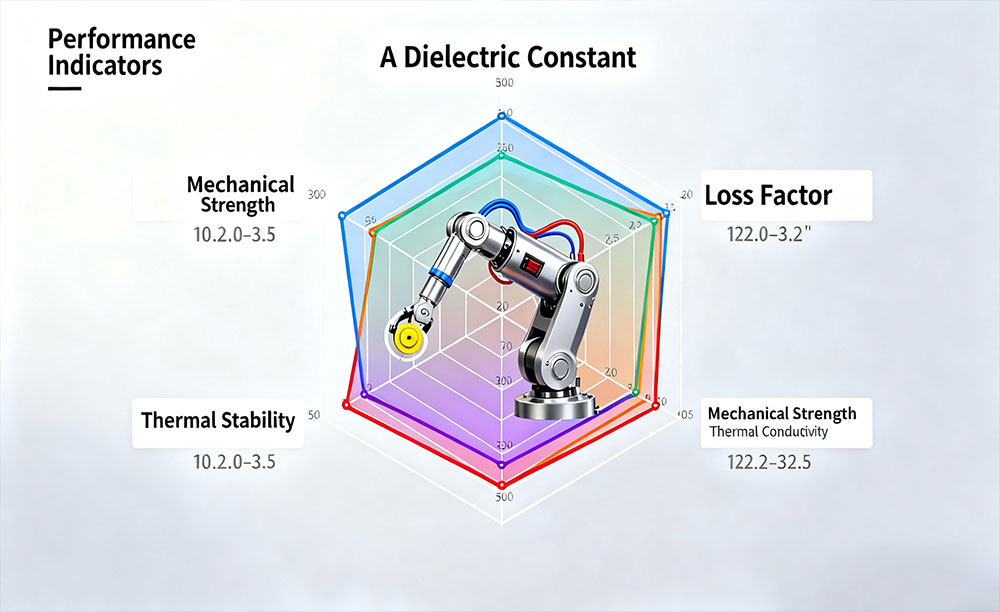
The primary indicator is dielectric performance. There are significant differences in the dielectric requirements for FCCL in different AI robot scenarios: industrial inspection robots need to transmit multiple sensor data and have high requirements for signal integrity. Therefore, LCP based FCCL with Dk ≤ 2.8 and Df ≤ 0.002 should be selected to avoid signal interference in complex factory environments; The data transmission rate of household service robots is relatively low, and modified PI substrate FCCL (Dk=3.0-3.5, Df=0.003-0.005) can be used to control costs while meeting performance requirements. Next is thermal stability. The CPU and motor drive module of AI robots generate heat during operation, and high-frequency FCCL needs to have a low coefficient of thermal expansion (CTE ≤ 15ppm/℃) to prevent substrate shrinkage or expansion caused by temperature rise, resulting in circuit offset. For example, the temperature of the control board of a medical surgical robot may rise to 60 ℃ after long-term operation. Using FCCL with high heat-resistant PI substrate can maintain dimensional stability at this temperature and avoid signal transmission failures affecting surgical accuracy.
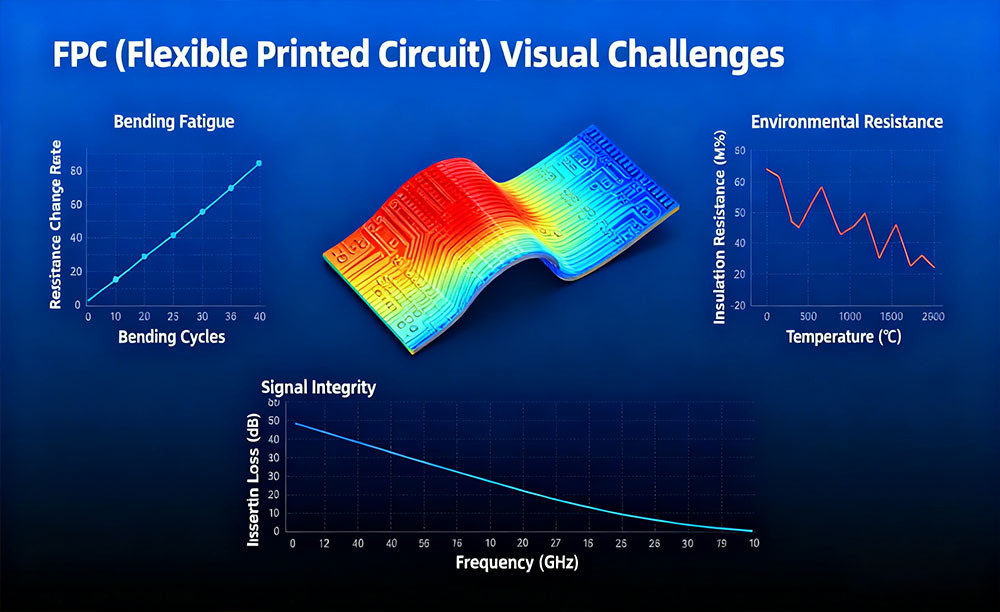
Finally, there is mechanical flexibility. High frequency FCCL needs to balance signal performance and bending reliability, especially in robot joints, movable arms, and other parts that need to withstand repeated bending. The industry has optimized the molecular structure of the substrate (such as introducing flexible segments in PI) to control the dielectric property change rate of high-frequency FCCL within 5% after 100000 bending cycles at 180 °. For example, the wrist soft hard joint plate of collaborative robots is equipped with a flexible optimized high-frequency FCCL, which can maintain stable high-frequency signals during frequent rotations, ensuring precise control of the robotic arm by the AI control system.
 return
return

Email: rainbow@dgpoorui.com
Company Address: Building 4, Yongjianhong Industrial Park, Guangtian Road, Yanluo Sub-district, Bao'an District, Shenzhen City
Copyright © 2021 Teleconix Inc. Powered by sznbone




 CN
CN Home >
Home >